邯郸发明专利巡礼——“一种横移机动态稳定方法及系统”
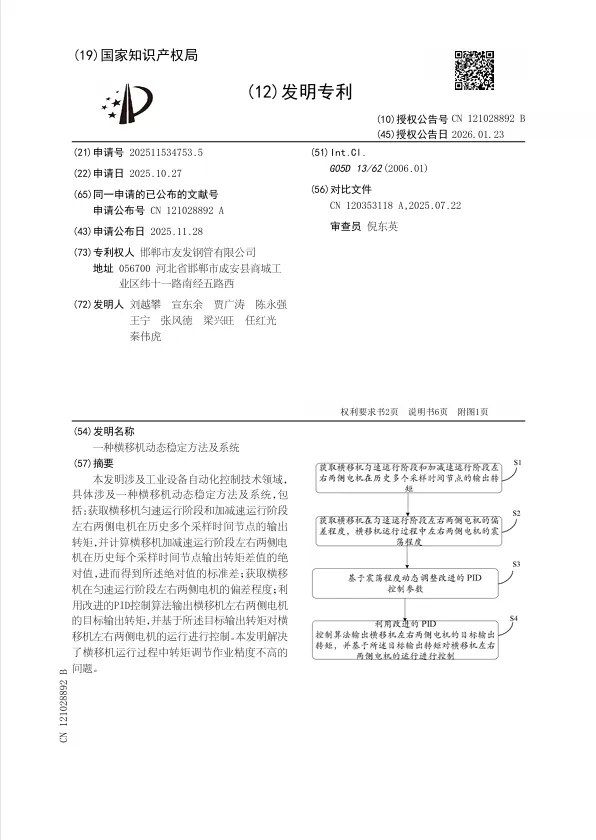
在现代化生产及自动化物流系统中,横移机作为一种常见的搬运与输送设备,被 广泛应用于仓储、车间、轨道运输及重载搬运等场景。横移机通常通过布置在其两侧的驱动 电机实现同步驱动,以保证设备在运行过程中能够沿既定轨迹平稳移动。由于横移机的工 作环境复杂,其运行状态不仅受到设备自身结构特性的影响,还会受到负载变化、摩擦力差 异、外部冲击以及轨道平整度等多种因素的干扰。在这种情况下,若左右电机输出转矩不同 步,容易造成横移机运行过程中的偏移、振动乃至结构冲击,这不仅会降低设备的运行平稳 性和作业精度,还可能加剧机械部件的磨损,缩短设备的使用寿命。 为了提升横移机的动态稳定性能,现有控制系统普遍采用PID控制算法来实现电 机输出的调节。PID控制因其结构简单、实现方便、参数直观,已在工业自动化领域得到广泛 应用。 然而,在横移机这一类对动态稳定性要求较高的场景中,传统PID算法的不足也逐 渐显现。首先,传统PID参数通常在系统设计或初始调试阶段通过经验法、试凑法或 Ziegler‑Nichols法等方式设定为固定值,而横移机在匀速运行阶段与加减速运行阶段,其 动态特性存在显著差异:在匀速阶段,电机转矩变化相对平缓,系统对扰动的敏感性较低; 但在加减速阶段,电机需要快速响应负载变化,转矩波动显著增强,此时固定的PID参数往 往难以兼顾快速性与稳定性,容易导致调节过度或响应迟滞,从而导致横移机运行过程中 转矩调节作业精度不高的问题。 本发明涉及工业设备自动化控制技术领域, 具体涉及一种横移机动态稳定方法及系统,包 括:获取横移机匀速运行阶段和加减速运行阶段 左右两侧电机在历史多个采样时间节点的输出 转矩,并计算横移机加减速运行阶段左右两侧电 机在历史每个采样时间节点输出转矩差值的绝 对值,进而得到所述绝对值的标准差;获取横移 机在匀速运行阶段左右两侧电机的偏差程度;利 用改进的PID控制算法输出横移机左右两侧电机 的目标输出转矩,并基于所述目标输出转矩对横 移机左右两侧电机的运行进行控制。本发明解决 了横移机运行过程中转矩调节作业精度不高的 问题。(特别注意:任何单位或者个人未经专利权人许可,都不得实施其专利,即不得为生产经营目的制造、使用、许诺销售、销售、进口其专利产品,或者使用其专利方法以及使用、许诺销售、销售、进口依照该专利方法直接获得的产品。)
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
